Moving on to the articulation design of Takara Tomy's Transformers Masterpiece MP-18 Streak after the previous posting. ^^






Thanks to its ball-type neck joint design, turning the head to all direction is very easy.


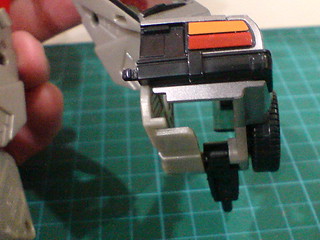
Double hinge joints for the missile launchers give them a very wide range of positioning possibilities. ^^

Either shoulder block is connected to the body via a hinge joint, which can be bent outward for a slight degree.


Using just the hinge joint of the shoulder blocks shown above, the arms can be positioned sitting closely inside their respectively shoulder cavity (left image), or expanded outward.

In "normal" configuration, the arm can be lifted from the side of its body for a little over 90 degrees.


Without expanding the shoulder block, the collision between the wheel and the edge of the shoulder prevents further upward lift by the arm.


With the shoulder block expanded, the shoulder has more room to perform an upward bend. ^^
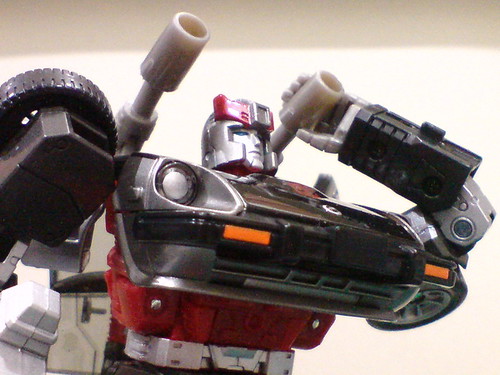
Rather typical ball-hinge combinational joint design for the shoulder joint, but the wide gap above the shoulder, with the hinge part of the shoulder joint pretty much being sandwiched inside it, ^^ should be a good indicator of how well the shoulders can move.

Utilizing the entire joint, as well as the wide top gap mentioned above, either shoulder can be hinged lower than chest level.

Either shoulder can be bent forward/backward very easily.

Swinging the arms forward/backward is very easy as well.

180 degrees for the elbow bend, which is a benefit inherited from its transformation design. ^^


The upper arm can swivel around the shoulder joint, and the hand can swivel around the wrist.

As shown in Part 3, the four fingers on either hand are molded as a single piece, and can be hinged outward for about 90 degrees, forming a spread palm. The thumb is not movable at all.


The wings (car doors) can be flipped forward for a more prominent display, or backward.
Since the doors are not meant to be opened in vehicle mode, the hinges incorporated are purely for a better display of the robot mode. ^^


As seen during its transformation, Streak's waist can be swivelled around the torso for a full 360 degrees. ^^


Hinge joints connect the side skirt armors to the waist.

Even though it's completely not visible in vehicle mode, and rarely seen in robot mode, there are some minor molded details beneath each side skirt armor parts, which I think is pretty cool. ^^
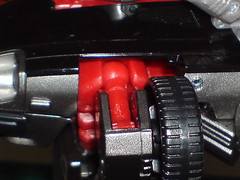
Rather typical swivel-hinge combinational joint for the hips.
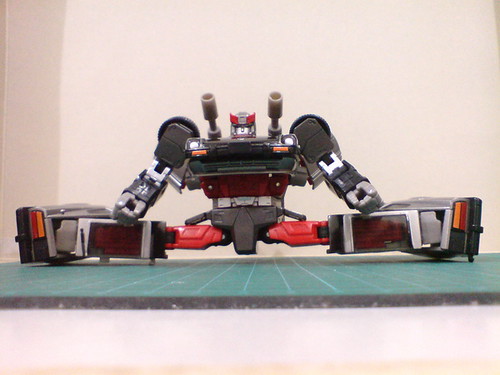
Very wide hip expansion enabled by the hinge component of the hip joints. ^^
Slightly limited, but still pretty impressive range of forward/backward bend for the legs enabled by the swivel component of the hip joints. ^^

The inability of the thigh to get past the rigid edge of the waist prevents it from further forward bend.


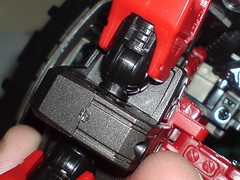
A nice bonus for the hips' articulation: separated thigh swivel is implemented. ^^
The thigh joint has some pipe details molded on top of it, which are only revealed when the thigh is rotated. ^^ Like the side skirt armor shown earlier on, I think the inclusion of mechanical details on these components that not many people would care about is a testament to the consistent good quality of the figure. ^^


Close to 180 degrees for the knee bend.
The door window folded on the calf limits the leg from bending further.

A relatively thin double hinge joint for the knee.


Despite the weird, blocky look of the foot, the ankle joint design allows it to be moved pretty much just like the same component on other action figures, bending it to the side as shown in the right image above for example. ^^
For such a wide bend angle (for Streak), the inner side of the leg will push the foot panel downward, leaving it protruding beneath the foot. So, as it turns out, even though the ankle joint is flexible enough to support such a wide bending, the end look isn't too pleasing to keep the part in that pose. ^^;


No articulation/display problem in hinging the foot forward/backward. ^^

The only consideration needed is manual adjustment for the ankle plate when the foot is bent. ^^;





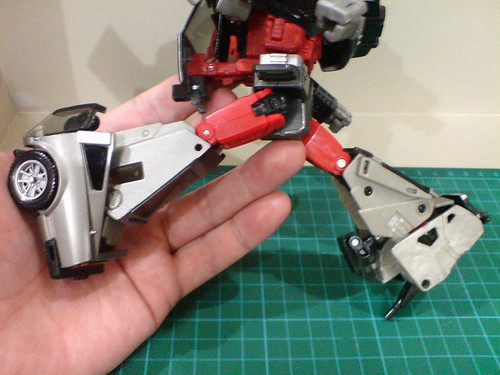
Since the thigh is unable to get past the bottom edge of the waist, the double hinge knee joint is mainly responsible for the figure's natural-looking kneeling pose. ^^

Technically, calling it a kneeling pose is cheating, XD since the knee joint has seeming been "retracted" into the calf to facilitate that kneeling pose. ^^
Some action poses of Transformers Masterpiece Streak utilizing the articulation design introduced earlier on: ^^






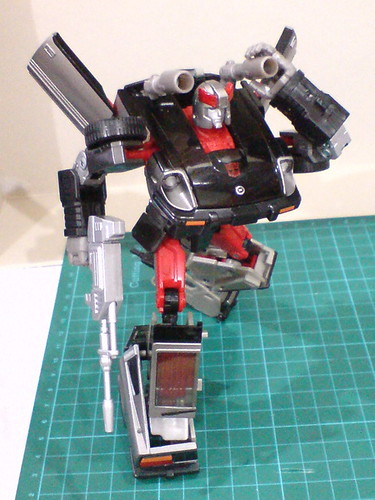
More action poses from Streak coming up in the next posting. ^^




No comments:
Post a Comment