A look at Robot Damashii [Side MS] Gouf Custom's articulation design after focusing on its plain standing pose in the previous posting. ^^



[Head]




Turning the head to all direction is very easy.
Apart from the head, the neck itself, which is hidden inside the chest area is actually a separately movable part.

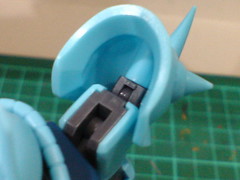
Separating the head and neck from the body to reveal the two ball-type joints that support the head's posability.

The top helmet part can be removed for the mono-eye camera to be adjusted.






Movement of the mono-eye camera.

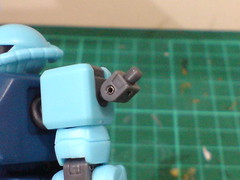
The shoulder joint is a rather standard, but very flexible ball/hinge combinatio joint.

Lifting the arm upward from the side of the body is limited by the shoulder armor.

The soft plastic conductive pipes are connected to the head via ball-type joints, and as you can see, they are flexible enough to accommodate the shoulder armor when it's adjusted to an "extreme" position. ^^


Using their ball joints, the shoulders can be bent forward/backward.


Using the hinge section of the joints, the shoulders can be bent upward/downward.
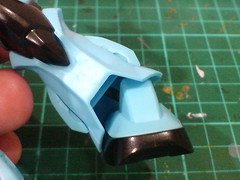
The shoulder armor is connected to the upper arm via a swivel/hinge combination joint.

This is how much the shoulder armor can be hinged downward using the joint shown above.
A closer look of the hinge joint when it's bent.


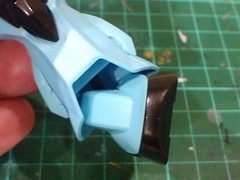
Forward/backward swivel of the joint.
This articulation point isn't really needed, as the shoulder armor itself restricts any forward/backward bending when it's equipped to the upper arm.


The upper arm can swivel around the shoulder joint.


(Left) Close to 180 degrees for the elbow bend.
(Right) Rear view of the elbow joint when it's bent.


Very flexible wrist movements enabled by its ball/hinge combination joint.



Two ball-type joints for the body allow it to be rotated from side to side rather flexibly.


The separate pieces of the backpack to waist conductive pipes are not long enough to support the waist's turning, unfortunately. ^^;
The good thing is, due to their soft plastic nature, the different pieces pop off without any danger of breaking when their limit is exceeded. They can be connected to their bases effortlessly. ^^



Forward/backward bends are possible for the waist as well.

The two thrusters are on ball-type joints, but their movement is so minor, and hard to detect. ^^;


A great design for the front and side skirt armors: their joints are located beneath waist conductive pipes, which allow each of them to be lifted for a solid 90 degrees. ^^

Closeup on the hinge joint incorporated for the skirt armors.

At first glance, the hip joints seem to be of a rather standard, but very flexible hinge/swivel combinational type. The joint design is a lot more complex, and fun to play with than that actually. ^^


The two sides of the hips are actually interconnected. This allows the hips to be rotated around the waist, but independently so.
Also, the port behind the hips to mount the figure to a Soul Stage display stand can be seen. ^^


Besides the bonus hip swing, the swivel part of each hip joint is also been designed differently from that on other action figures - it's on a bar that increases the range of the hip swivel when the joint is bent forward/backward. ^^
However, the bar is really tough to move. ^^;

Another nice bonus for the hips' articulation: separated thigh swivel is implemented. ^^

Very wide hip expansion enabled by the hinge component of the hip joints. ^^

Very impressive range of forward bend for the legs, enabled by the swivel component of the hip joints. ^^
Bending the leg backward is difficult, as the thigh is blocked by the fixed rear skirt armor.


180-degree knee bend. ^^

Large plate as movable hinge inside each knee is a bit too simple-looking when the knee is bent. ^^;


The ankle articulation is enabled by a double ball-type joint that is quite common in design for Zeon-type action figures.
The right tolerance gives the feet ample range of movement, but doesn't expose the clearance when the joint is collapsed in normal standing pose. ^^

The ankle joint is just a simple curved bar with ball-type joints at its two tips.





With all of its flexible joints, a natural-looking kneeling pose for the figure can be configured very easily. ^^
Some action poses of Robot Damashii [Side MS] Gouf Custom utilizing the articulation design introduced above: ^^

By making the right adjustments to its various body and leg joints, a very stable one-legged stance can be achieved very easily with the figure. ^^







Supported using Soul Stage Act 5 Action Support Type for Mechanics Clear Ver.



More action poses from this Robot Damashii action figure coming up next. ^^




No comments:
Post a Comment