A look at the articulation design of Robot Damashii [Side MS] Gundam Exia after going through that of the MSIA version yesterday.
The design is definitely more superior than the MSIA version, as expected. Almost all the joints were redesigned to be tighter, with many limitations of the MSIA version rectified. See the previous posting on the MSIA version first and then this one and you'll see why. ^^
Then again, amidst all the awesome features and design, a weakness is spotted, unexpected by the designer maybe? ^^;




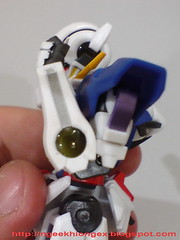
Thanks to a much longer neck, the movement range for the head is much wider. Action poses such as bending the head upwards is possible now.
The cheek doesn't hit the yellow V-fins anymore as well.



Much like the HG 1/144 scale plamo kit version, the shoulder block is attached to the shoulder joint, allowing the two components to move in sync.

Unlike the MSIA version, the shoulder armor has its own joint, allowing the arms to be lifted upwards.

No more hollow spot for the elbow.
The elbow can bend for 90 degree - a little bit better than the MSIA version.

Ball-type joint for the wrist allows the hand units to be expressive on their own (in poses without any weapon attached I mean).







Unrealistic waist joint design (to the mecha setting) permits many crazy poses for the body. ^^

The GN Drive can move to the left and right as well, although I'm not very sure the purpose of such design. ^^;

Following the design of the plamo kit this time (the usual design in my opinion), the front skirt armor is attach to the groin and can move independently.

Separated joint at the hip level for greater articulation of the legs.

180-degree split ^^

A closer look at the hip joint.

Wide articulation for the knee joint, but the problem of the thigh blocked by the front skirt armor, an inherited weakness from the HG and 1/100 scale plamo kit version can be seen there.


Very tight knee joint.

The knee armor that can split from the lower leg when it's bent is an attraction.
The top part of the leg armor being painted in gray to distinguish between armor and mecha component is a show of attention to details by the designer.


A combo of ball-type and hinge joint for the ankle. The foot has 2 articulation points as well.

Apart from the heel armor, the component linking the GN Condenser on the side of the leg can move as well.


Not the best kneeling pose unfortunately. ^^; The MSIA version can do better for this.
The change of the front skirt armor to the "usual" joint design also caused the figure to inherit its weakness from the plamo kit version. The thigh will hit the front skirt armor when moved forward, which will put a stop to the pose attempt. ^^; I remembered there was once when the front skirt armor just swung/flew off when I tried to push the leg forward a little bit more. No damage done to the leg or the armor though, fortunately.
The MSIA version, through the very unconventional design and the use of soft rubber mentioned yesterday, managed to surprise the Robot Damashii version by being able to perform the pose easily.
Anyway, the superiority of the overall articulation design is undeniable. Whatever the MSIA version can do, this Robot Dmashii version can do better.




1 comment:
Total pwn for the MSIA version^^
Post a Comment